前馈式3D的终极路线图来了!五大核心战线,一文看清未来三维重建该往哪走
前馈式3D的终极路线图来了!五大核心战线,一文看清未来三维重建该往哪走从单幅图像恢复三维结构,到多视图场景建模、动态 4D 重建,再到机器人、自动驾驶、SLAM 与视频生成,如何让模型在不依赖逐场景优化的前提下,直接、高效地理解并重建三维世界,正在成为 3D 视觉领域的
来自主题: AI技术研报
9773 点击 2026-04-26 12:09
 搜索
搜索
从单幅图像恢复三维结构,到多视图场景建模、动态 4D 重建,再到机器人、自动驾驶、SLAM 与视频生成,如何让模型在不依赖逐场景优化的前提下,直接、高效地理解并重建三维世界,正在成为 3D 视觉领域的

SLAM 在自动驾驶、机器人、AR/VR 乃至具身智能系统中都是至关重要的环节,它决定了算法能否在一个陌生环境中一边“看懂世界”,一边“知道自己在哪”。
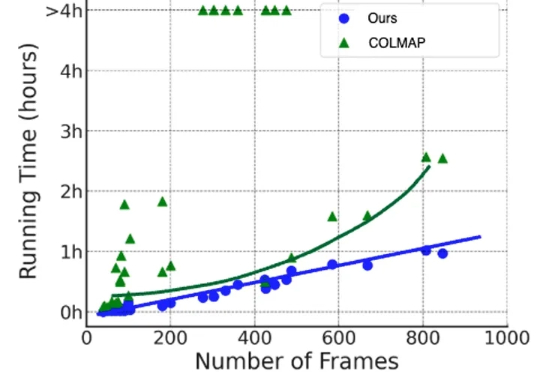
在三维重建、NeRF 训练、视频生成等任务中,相机参数是不可或缺的先验信息。传统的 SfM/SLAM 方法(如 COLMAP)在静态场景下表现优异,但在存在人车运动、物体遮挡的动态场景中往往力不从心,并且依赖额外的运动掩码、深度或点云信息,使用门槛较高,而且效率低下。
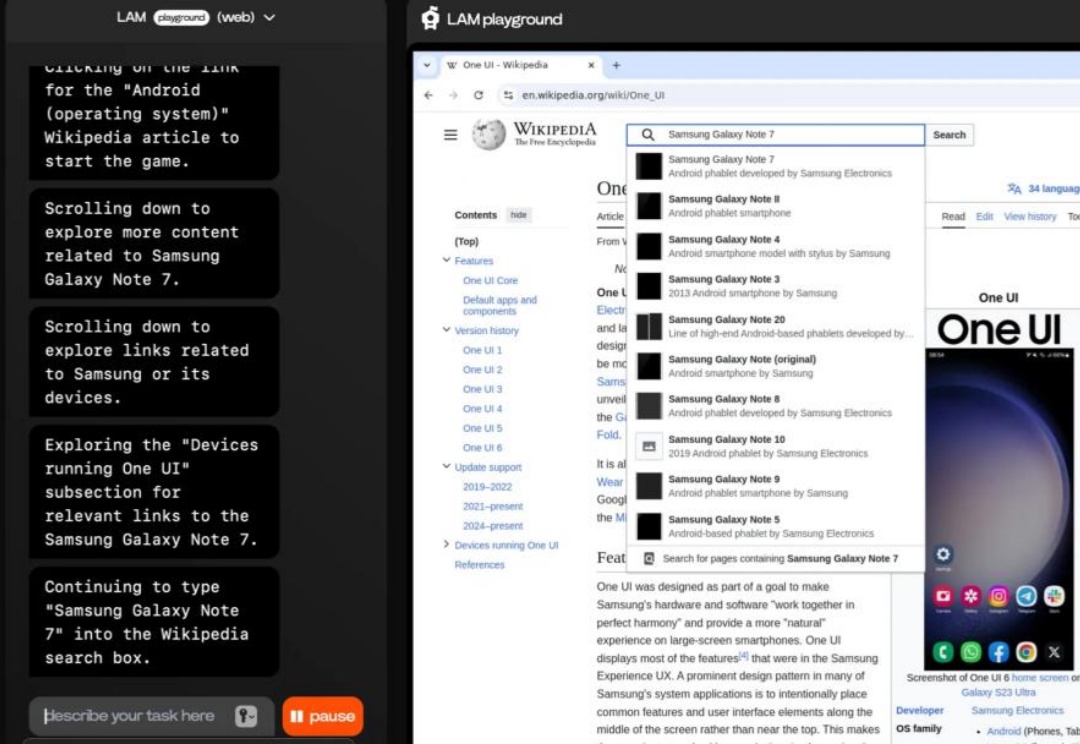
「即便最终赢家不是它,它也足够意义重大。」一位 LAM 产品经理这样评价 Manus AI 的行业价值。
据外媒 12 月 20 日消息,由华人创立的 AI 公司 rabbit 又获得了一笔千万美元的融资,这是他们近 2 个月所获得的第 3 笔融资。